binfalse
apt-get install WP
January 8th, 2011Finally I also upgraded my blog to Wordpress@3.0.4, eliminating a critical bug.
Rumpel frequently reminded me to do that, but I was too lazy to find my own modifications to the WP core… But today I did! And thinking ahead, here I record what I’m changing to this version! Majorly for me, but maybe you like it ;-)
Display whole tag cloud in wp-admin
When you create an article WP by default only displays the 45 most-used tags in the sidebar. I want to see all of them:
File to change: wp-admin/includes/meta-boxes.php
273c273
< <p class="hide-if-no-js"><a href="#titlediv" class="tagcloud-link" id="link-<?php echo $tax_name; ?>"><?php echo $taxonomy->labels->all_items; ?></a></p>
---
> <p class="hide-if-no-js"><a href="#titlediv" class="tagcloud-link" id="link-<?php echo $tax_name; ?>"><?php echo $taxonomy->labels->choose_from_most_used; ?></a></p>File to change: wp-admin/admin-ajax.php
616c616
< $tags = get_terms( $taxonomy, array( 'number' => 999, 'orderby' => 'count', 'order' => 'DESC' ) );
---
> $tags = get_terms( $taxonomy, array( 'number' => 45, 'orderby' => 'count', 'order' => 'DESC' ) );Remove http:// from JavaScript prompts
If I want to insert a link into an article I often use the button above the textarea. It’s very friendly from WP to remind the users to start links with http:// , but for me it’s only disgusting because I usually copy&paste the URL from the browsers address bar and have to delete the http:// from the pop-up…
To delete them permanently edit wp-includes/js/quicktags.js . Unfortunately this script is just one line, so a diff won’t help you, but I can give you a vim substitution command:
s/"http:\\/\\/"/""/gUpdate 07. July 2011: For WP > 3.2 you also need to apply this regex for wp-includes/js/tinymce/plugins/wplink/js/wplink.js to also eliminate this disgusting http:// from the new link-overlay…
ShortCut[GPG]: Mysterious crypto mails
January 7th, 2011When I write mails to people for the first time they usually answer them immediately with something like
What is that crazy crypto stuff surrounding your mails? Wondering why I can't read it!?
There are lots of legends out there belonging to this clutter, most of them are only fairy tales, here is the one and only true explanation!
As a friend of security I always try to encrypt my mails via GPG. That is only possible if the recipient is also using GPG and I have his/her public key. If this is not the case, I just sign my mail to give the addressee the chance to verify that the mail is from me and nobody else on its way has modified the content of the mail. So the clutter is the electronic signature of the mail! It’s a simple ASCII code, however not readable for human eyes but readable for some intelligent tools.
There are two kinds of signatures:
- inline signature: it surrounds the message with cryptographic armor. That has the disadvantage that you can't sign attachments or HTML mails and the text is more or less hidden between PGP-goodies.
- attached signatures: the crypto stuff is attached as signature.asc. With the disadvantage that mailservers may be alarmed from this attachment and drop the mail.
Since I usually write ASCII mails without attachments I sign them inline. Such a signed mail that reaches your inbox may look like:
-----BEGIN PGP SIGNED MESSAGE-----
Hash: SHA1
Dear Malte,
just asking for the weather on the other shore!?
Regards, Martin
-----BEGIN PGP SIGNATURE-----
Version: GnuPG v1.4.10 (GNU/Linux)
Comment: Using GnuPG with Mozilla - http://enigmail.mozdev.org/
iEYEARECAAYFAk0hAAsACgkQ2bNRc0RtswagiwCeL5HPAGff5U34ldjeHIAgHiHS
T48AnjB+XPC7fTWcYw7S94IWAzvDTGkD
=PLl7
-----END PGP SIGNATURE-----Depending on the used mail-client I usually also attach my public key, so if you’re using a mail-client that is able to handle GPG signed/encrypted mails it should parse the crypto stuff and verify whether the signature is correct or not. In this case the mail will be collapsed so that you’ll see something like this (with an indication whether the signature was valid or not):
Dear Malte,
just asking for the weather on the other shore!?
Regards, MartinBut if you’re using a client that doesn’t ever heard about GPG it won’t recognize the cryptographic parts and you’ll only see lot’s of clutter. In this case I recommend to change the mail-client! ;-)
To learn more about GPG take a look at gnupg.org.
web content anlayzer
January 6th, 2011Just developed a small crawler to check my online content at binfalse.de in terms of W3C validity and the availability of external links. Here is the code and some statistics…
The new year just started and I wanted to check what I produced the last year in my blog. Mainly I wanted to ensure more quality, my aim was to make sure all my blog content is W3C valid and all external resources I’m linking to are still available. First I thought about parsing the database-content, but at least I decided to check the real content as it is available to all of you. The easiest way to do something like this is doing it with Perl, at least for me. The following task were to do for each site of my blog:
- Check if W3C likes the site
- For each link to external resources: Check if they respond with
200 OK - For each internal link: Check this site too if not already checked
While I’m checking each site I also saved the number of leaving links to a file to get an overview. Here is the code:
You need to install LWP::UserAgent , XML::TreeBuilder and WebService::Validator::HTML::W3C . Sitting in front of a Debian based distribution just execute:
aptitude install libxml-treebuilder-perl libwww-perl libwebservice-validator-css-w3c-perl libxml-xpath-perlThe script checks all sites that it can find and that match to
m/^(http(s)?:\\/\\/)?[^\\/]*$domain/iSo adjust the $domain variable at the start of the script to fit your needs.
It writes all W3C results to /tmp/check-links.val , the following line-types may be found within that file:
# SITE is valid
ok: SITE
# SITE contains invalid FAILURE at line number LINE
error: SITE -> FAILURE (LINE)
# failed to connect to W3C because of CAUSE
failed: CAUSESo it should be easy to parse if you are searching for invalids.
Each external link that doesn’t answer with 200 OK produces an entry to /tmp/check-links.fail with the form
SITE -> EXTERNAL (RESPONSE_CODE)Additionally it writes for each website the number of internal links and the number of external links to /tmp/check-links.log .
If you want to try it on your site keep in mind to change the content of $domain and take care of the pattern in line 65:
$href =~ m/\\/$/Because I don’t want to check internal links to files like .png or .tgz the URL has to end with / . All my sites containing parseable XML end with / , if your sites doesn’t, try to find a similar expression.
As I said I’ve looked to the results a bit. Here are some statistics (as at 2011/Jan/06):
| Processed sites | 481 |
| Sites containing W3C errors | 38 |
| Number of errors | 63 |
| Mean error per site | 0.1309771 |
| Mean of internal/external links per site | 230.9833 / 15.39875 |
| Median of internal/external links per site | 216 / 15 |
| Dead external links | 82 |
| Dead external links w/o Twitter | 5 |
Most of the errors are now repaired, the other ones are in progress.
The high number of links that aren’t working anymore comes from the little twitter buttons at the end of each article. My crawler is of course not authorized to tweet, so twitter responds with 401 Unauthorized . One of the other five fails because of a cert problem, all administrators of the other dead links are informed.
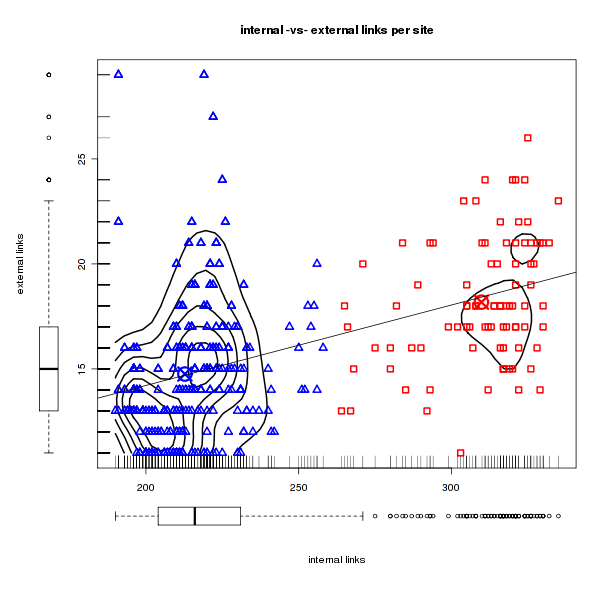
I also analyzed the outgoing links per site. I’ve clustered them with K-Means, the result can be seen in figure 1. How did I produce this graphic? Here is some R code:
library(MASS)
x=read.table("check-links.log")
intern=x[,1]
extern=x[,2]
z <- kde2d(intern,extern, n=50)
# cluster
colnames(x) <- c("internal", "external")
(cl <- kmeans(x, 2))
# draw
png("check-links.png", width = 600, height = 600)
# save actual settings
op <- par()
layout( matrix( c(2,1,0,3), 2, 2, byrow=T ), c(1,6), c(4,1))
par(mar=c(1,1,5,2))
contour(z, col = "black", lwd = 2, drawlabels = FALSE)
points(x, col = 2*cl$cluster, pch = 2 * (cl$cluster - 1),lwd=2,cex=1.3)
points(cl$centers, col = c(2,4), pch = 13, cex=3,lwd=3)
rug(side=1, intern )
rug(side=2, extern )
abline(lm( external ~ internal, data = x))
title(main = "internal -vs- external links per site")
# boxplot left
par(mar=c(1,2,5,1))
boxplot(extern, axes=F)
title(ylab='external links', line=0)
# boxplot right
par(mar=c(5,1,1,2))
boxplot(intern, horizontal=T, axes=F)
title(xlab='internal links', line=1)
# restore settings
par(op)
dev.off()You’re right, there is a lot stuff in the image that is not essential, but use it as example to show R beginners what is possible. Maybe you want to produce similar graphics!?
Pre- and Post-suspend
January 5th, 2011Today I got another complaint in a row of complaints of my Jabber contacts, arguing that they can’t send me messages although my account seems to be online in their buddy list. That happens when I put my notebook to sleep, this time I got informed by Micha.
Here are 3 steps to patch this problem, dealing with gajim-remote, PowerManagement-Utils and DBus.
This annoying events happens when I was online with my notebook and close the lid so the notebook goes sleeping. Unfortunately my Jabber client Gajim doesn’t notice that I’m going to disconnect and so the Jabber server isn’t informed about my absence. Due to connection instabilities the server waits some time of inactivity until it recognizes that there is really no more client before it tells all my friends I’m gone. During this time I appear online but messages are not able to reach my client, so they are lost in hell. That sucks, I know, and now I’ve reacted.
First of all I checked how to tell Gajim to disconnect via command line and found the tool gajim-remote , it comes with Gajim itself. Here are some examples of using it:
# disconnect
gajim-remote change_status offline
# reconnect setting status message to "meetunix is sexy"
gajim-remote change_status online "meetunix is sexy"
# learn what can be done!?
gajim-remote -hOf course the manpage will give you more information.
Ok, so far, next task is to understand what is done when the lid is closed. The task to suspend or hilbernate is, at least in my case, done by pm-utils (PowerManagement-Utils). It comes with some tools like pm-suspend or pm-hibernate and so on. To tell these tools to do something before respectively after suspending there is a directory in /etc/pm/sleep.d . Here You can leave some script that look like those in /etc/init.d/* .
Here is a smart example now located in /etc/pm/sleep.d/01users on my notebook, you can use it as skeleton:
#!/bin/bash
# check which users are logged in
USERS=$(/usr/bin/finger | /bin/grep ':0'| /bin/grep -o '^\\w*'| /usr/bin/uniq)
prepare_sleep ()
{
for user in $USERS
do
uhome=$(/bin/su $user -c 'echo $HOME')
[ -x $uhome/.suspend ] && /bin/su $user -c $uhome/.suspend
done
}
revive ()
{
for user in $USERS
do
uhome=$(/bin/su $user -c 'echo $HOME')
[ -x $uhome/.awake ] && /bin/su $user -c $uhome/.awake
done
}
case "$1" in
hibernate|suspend|suspend_hybrid)
prepare_sleep
;;
thaw|resume)
revive
;;
*) exit 1
;;
esac
exit 0Make it executable and give it a try. It checks for each logged-in user whether there is a .suspend or .awake in its $HOME to execute it before suspending respectively after resuming.
Next step is telling Gajim to change its status. Unfortunately the gajim-remote script is speaking to the running Gajim-instance via DBus. You may have heard about DBus, there are two main options of DBus buses: system- and session-bus. To speak to Gajim you use the session DBus and need the bus address. That is a problem, this address is acquired while your X-login, and you don’t know it from a remote session or if the system executes scripts while suspending. So if you just try to execute gajim-remote change_status offline in your .suspend you’ll get an error like D-Bus is not present on this machine or python module is missing or Failed to open connection to "session" message bus .
Your DBus session address within an X-session is set in your environment in $DBUS_SESSION_BUS_ADDRESS ( echo $DBUS_SESSION_BUS_ADDRESS ).
So what are your options to get this address for your .suspend script?
- You can export your
envto a file when you login (maybe automatically via.xinitrc) to parse it - All addresses are saved in
$HOME/.dbus/session-bus/, so try to find the right one.. - Get it from a process environment
The last possibility is of course the nicest one. So check if Gajim is running and extract the DBUS_SESSION_BUS_ADDRESS from /proc/GAJIM_PID/environ ! Here is how it can be done:
#!/bin/bash
gajim_logout ()
{
# is gajim-remote present
[ -x /usr/bin/gajim-remote ] || return 1
# is gajim running
gajim_pid=$(/bin/ps -f --user $(whoami) | /bin/grep [g]ajim.py | /usr/bin/awk '{print $2}')
[ -f /proc/$gajim_pid/environ ] || return 1
# get the dbus address
DBUS_SESSION_BUS_ADDRESS=$(/bin/cat /proc/$gajim_pid/environ | /bin/grep -z DBUS_SESSION_BUS_ADDRESS | /bin/sed 's/^[^=]*=//')
[ -n $DBUS_SESSION_BUS_ADDRESS ] || return 1
export DBUS_SESSION_BUS_ADDRESS
# now gajim is ready to go offline ;-)
/usr/bin/gajim-remote change_status offline >> /dev/null
}
gajim_logout
exit 0That’s it, great work! Save this file in $HOME/.suspend and give it the right for execution. You can also write a similar script for $HOME/.awake to reconnect to your Jabber server, but you eventually don’t want to reconnect each time you open the lid..
So the next time I close my laptops lid Gajim disconnects immediately! No annoyed friends anymore :P
ShortCut[image]: ScreenShooting a JPanel
January 4th, 2011This is about taking a screenshot of a JPanel to save the visible stuff as an image to disk.
Sometimes it may happen that you create a swing GUI with a panel to draw cool stuff. Here you can learn how to let the user take a screenshot of this graphic with a single click on a button.
First of all create such a JPanel and fill it with crazy graphics, then create a BufferedImage with the size of the panel and tell the panel to draw its content to this image instead of printing the content to the screen and, last but not least, save this image:
// create a panel
javax.swing.JPanel panel = new javax.swing.JPanel ();
// [..] tell the panel to look nice
// create an image
java.awt.image.BufferedImage bImage = new java.awt.image.BufferedImage (panel.getSize ().width, panel.getSize().height, java.awt.image.BufferedImage.TYPE_INT_RGB);
// tell the panel to draw its content to the new image
panel.paint (bImage.createGraphics ());
// save everything
try
{
java.io.File imageFile = new java.io.File ("/tmp/screener.png")
imageFile.createNewFile ();
javax.imageio.ImageIO.write (bImage, "png", imageFile);
}
catch(Exception ex)
{
ex.printStackTrace ();
}You see it’s very simple. Of course it’s also possible to create other types of image with ImageIO, like JPEG or GIF, but for more information take a look in the documentation. In a project that will be published you should think about using a JFileChooser instead of hard coding the name of the new image ;-)
